
Cornell Sr. Research Engineer & NASA Post Doctoral Fellow
Icefin Robot
.jpg) | 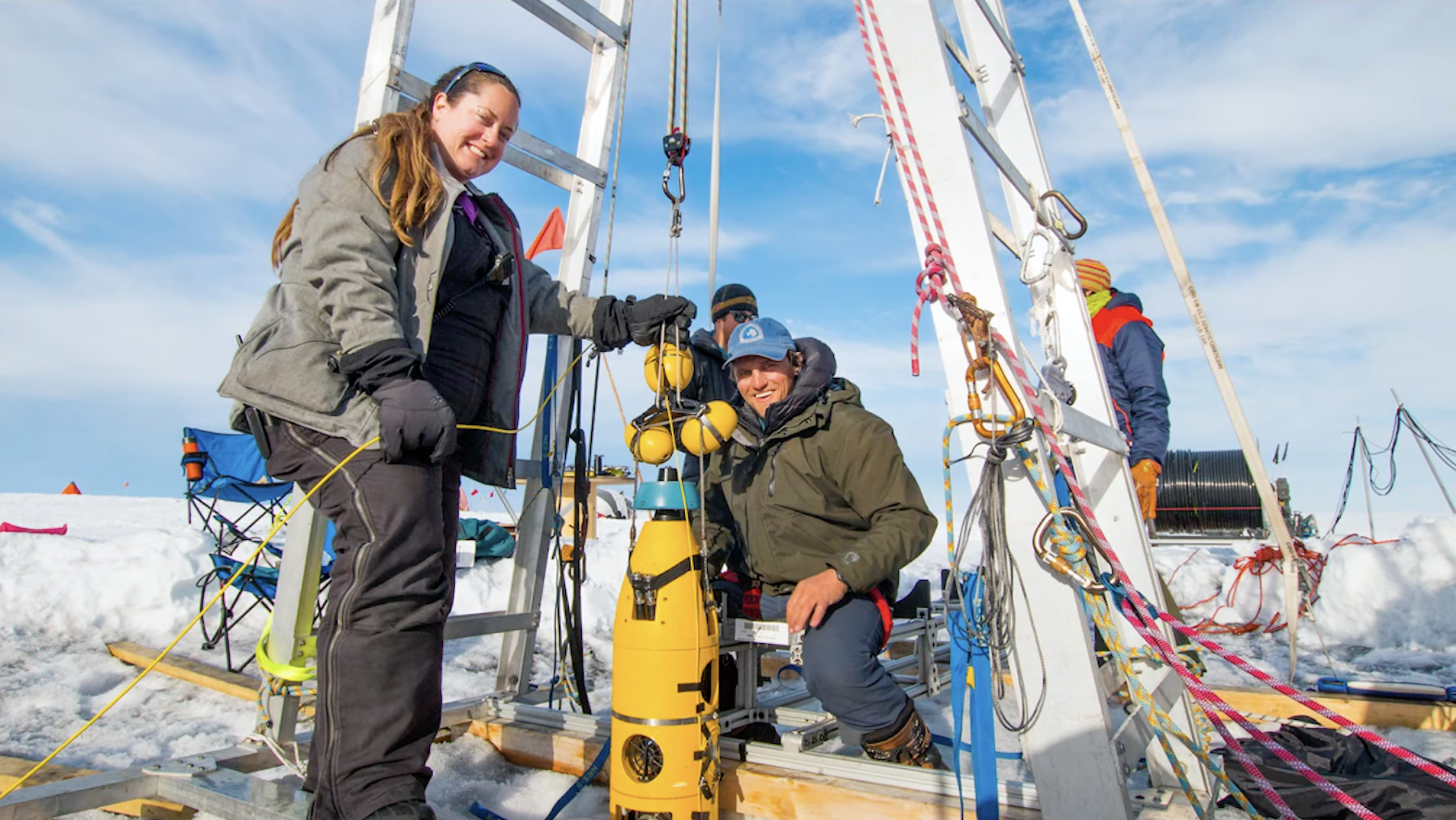 |
Description: Icefin is a modular underwater robot (130 kg, 23 cm diameter, 3.5 m length) designed for under-ice exploration. It is a tool for polar research, as well as a NASA funded project advancing technologies for future exploration of ocean worlds such as Europa. The robot integrates perception (sonar, imaging), ocean sensors (CTD, DO), navigation (IMU, ADCP), onboard battery power, and 5 DOF thruster actuation. - Icefin Homepage, Thwaites ‘Melt’ Project
Contributions: As an engineer on the Icefin team, I collaborated with interdisciplinary teams (3 to 9 members) to test, develop, and deploy robot. Executed 50+ sub-ice robotic missions (~8 hours each, surveys up to 2km+ long and 800m+ deep). Conducted techincal vehicle deployments through narrow holes (~35cm) drilled through up to 600m of glacier ice. Developed standard operating procedures, checklist protocols, and hazard assessments.
- Field Seasons: Conducted three field seasons in Antarctica, working on five projects (totaling 38+ weeks). Operated in harsh weather (-25°C to 0°C), at remote resource-constrained tent camps (up to 1300 km from station), accessed by planes, for up to 5 weeks at a time.
- 2018-19: Ross Ice Shelf & Europa Underwater Probe (RISEUP)
- 2019-20: International Thwaites Glacier Collaboration (ITGC)
- 2021-22: HiPSMI - Ocean Supercooling Study, Scott Base Bathymetric Survey, Kamb Ice Stream
Outcomes: The Icefin team collected ocean data in previously inaccesible regions beneath Antarctic glaciers. Surveys revealed key processes impacting ice melt, providing critical data for modeling sea level rise. Concurrently, deployments beneath ice shelves demonstrated important capabilities for future ocean worlds exploration.
Co-Authored Publications: Schmidt et al. Nature 2023, Davis et al. Nature 2023, Lawrence et al. Nature Geoscience 2023, Meister et al. IEEE Global OCEANS 2020
Media: BBC, New York Times, Washington Post, Wall Street Journal, more
Collaborators: Worked with international partners including the British Antarctic Survey (BAS), Antarctica New Zealand (ANZ), International Thwaites Glacier Collaboration (ITGC).
- Funding: Contributed to projects with $5.6M+ NASA/NSF funding led by PI B.E. Schmidt, including NASA Planetary Science and Technology from Analog Research (PSTAR) grant ‘Ross Ice Shelf and Europa Underwater Probe (RISEUP)’ and NSF International Thwaites Glacier Collaboration.
Submersible Digital Holographic Microscope (DHM)
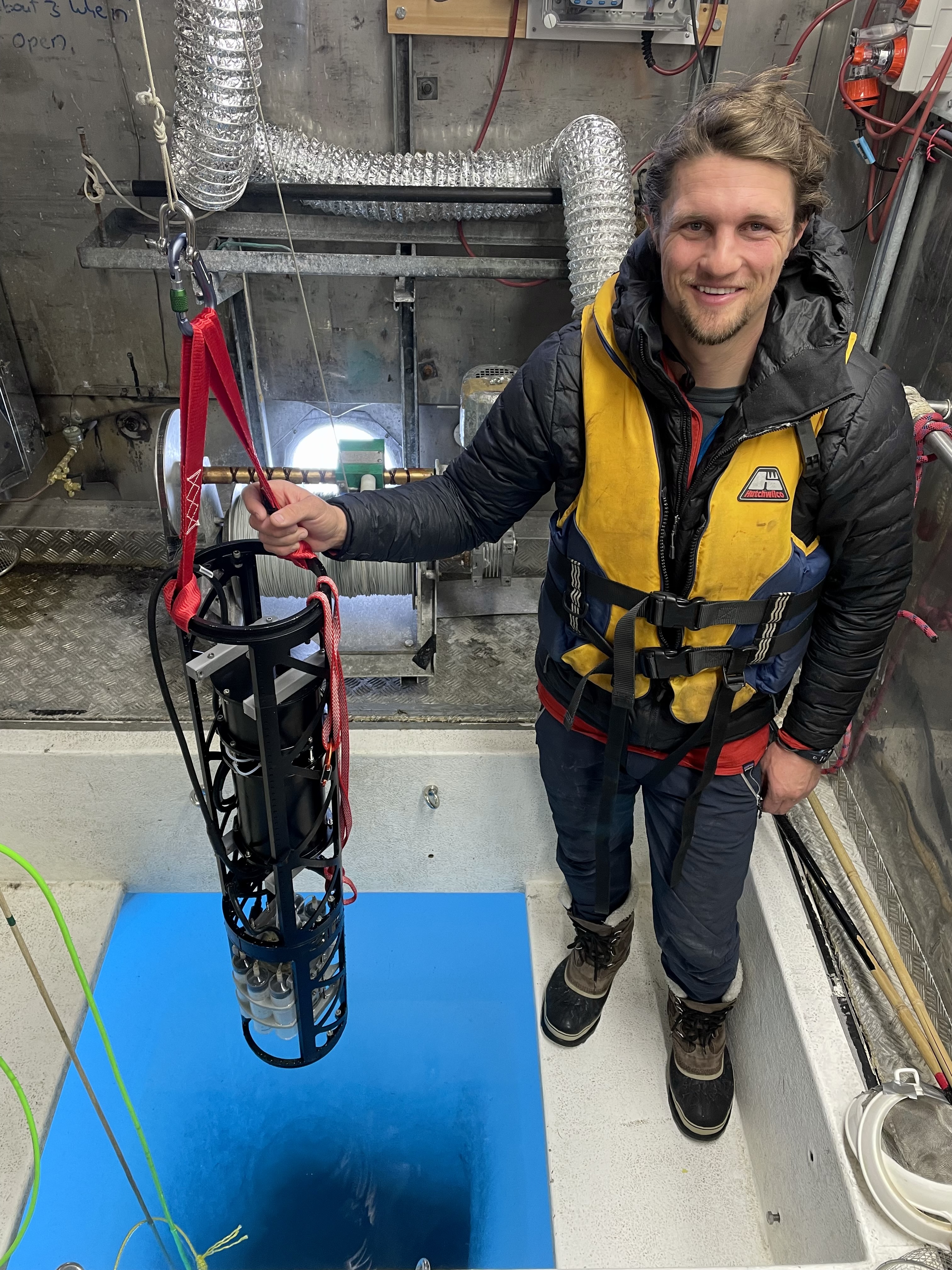 DHM Antarctic deployment. | 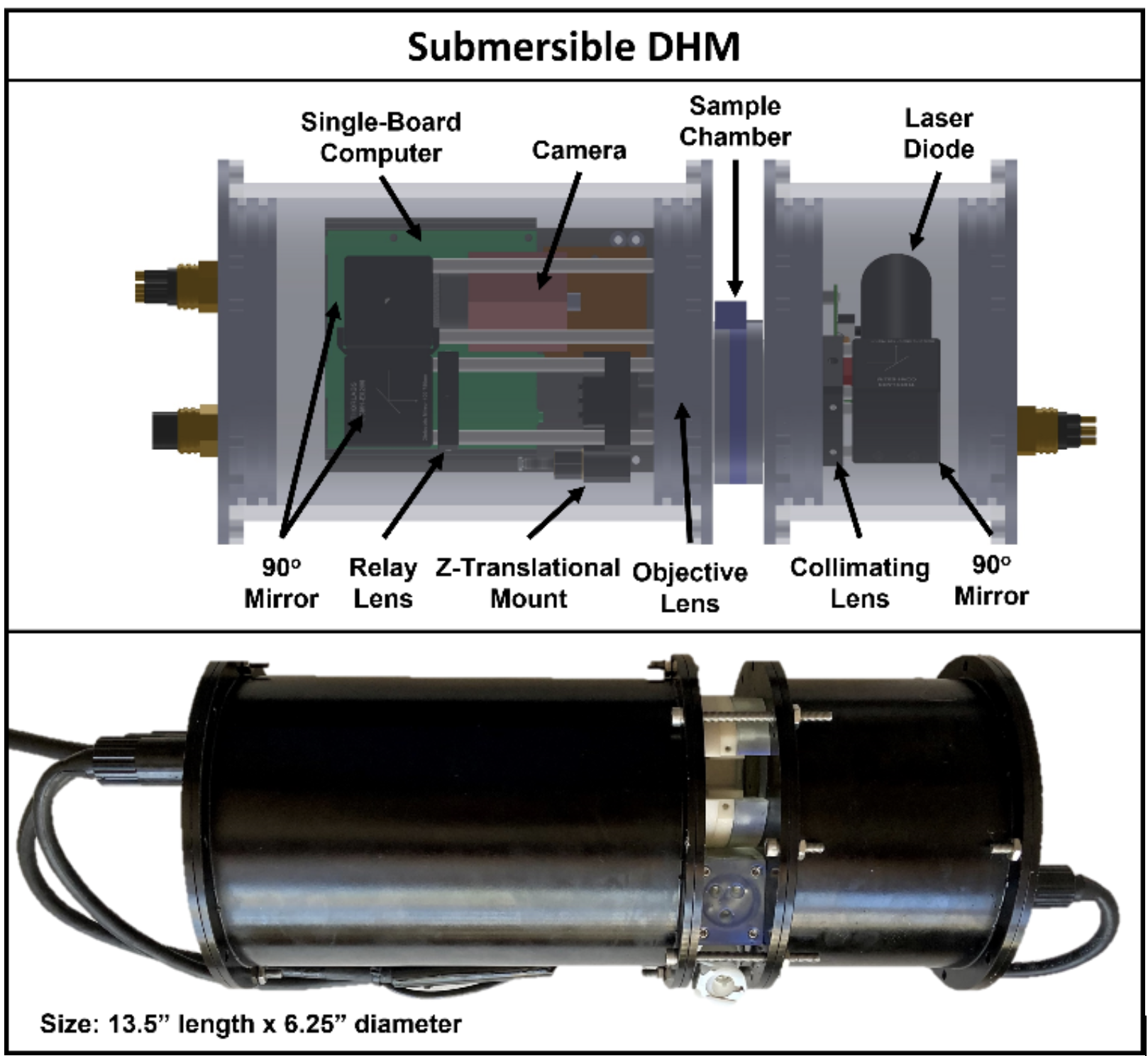 DHM system design. |  Euglena motility observations in lab experiment. |
Description: This project developed a submersible DHM for the Icefin ROV. Holography is a computational imaging technique used to record a three dimensional volume. The submersible DHM uses this approach at small scale to observe microbial motility in the ocean. This is a proof of technology for future life detection missions to ocean worlds, and builds on existing DHM work from JPL.
Contribution: Concieved project, led collaboration between Georgia Tech & NASA JPL, and secured funding ($160k+ NASA NPP proposal, 15 page competitive grant). Led development of instrument including compact microscopic optics (camera, laser, lenses), electromechanics (pressure vessel, embedded computing), and image processing software (Python/OpenCV, particle tracking). Integrated DHM with Icefin robot, deployed system in Antarctica, and analyzed data.
Outcomes: DHM achivied high resolution (<1 µm) underwater, while having a compact form factor (~35 cm length x 16 cm diameter) allowing integration with Icefin. Deployed in sub-ice Antarctic waters (1.8 °C water, 400 m) as an analog for future “ocean world” exploration. Observed in situ microbial motility as a life detection signature.
Publication: journal paper in prep, presented at AGU AbSciCon 2022
Oceans Across Space & Time (OAST)
 |  |
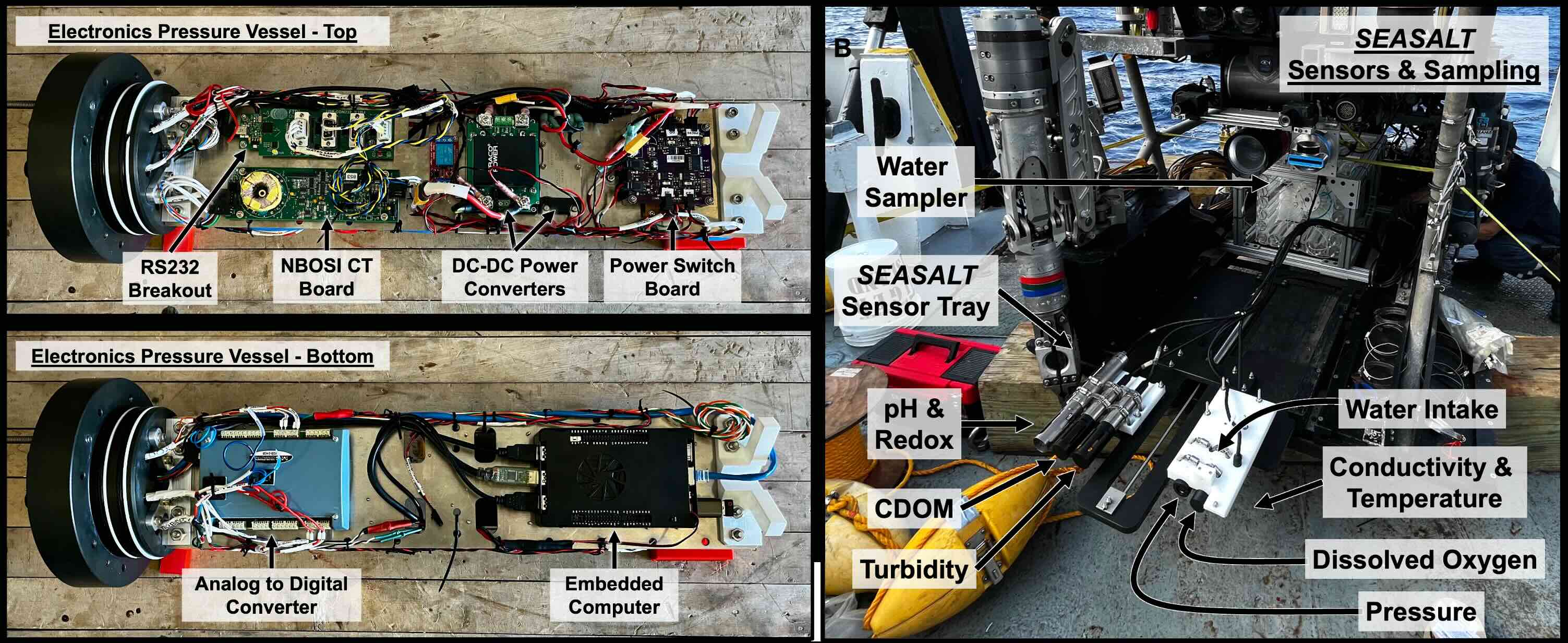 |
Description: The OAST project is a NASA Astrobiology funded effort to study extreme salty environments on Earth as an analog for other planets. The Orca Basin cruise conducted underwater robotic investigations of the hypersaline Orca Basin brine pool (salinity >7x ocean water, 2400m depth). - OAST Homepage
- Contributions: Led team which developed a custom instrument package for a robotic vehicle (5-person team, 6-month build). Engineered real-time data visualization (Python), electromechanical systems (pressure vessel, embedded computing, power), and integration of 8 sensors (sonar, chemical, physical, sampling). Initiated commercial ROV partnership with Oceaneering Inc. and integrated $200k+ payload with ROV Global Explorer (3400 lbs, 9’x5’x4’).
- 2023: Orca Basin – Conducted 14 Day Research Cruise (RV Point Sur) coordinated with 13-person team science-engineering team to conduct 10 dives into brine pool.
Outcomes: Team conducted first-of-their-kind ROV dives into a hypersaline brine pool. Mapped distinct fine scale physical-chemical layering in Orca Basin, and collected precise water samples using real-time sensor data for extremophile research.
- Funding: Work funded by $7.1M NASA NASA Astrobiology Program grant led by PI BE Schmidt.
Vertical Entry Robot for Navigating Europa (VERNE)
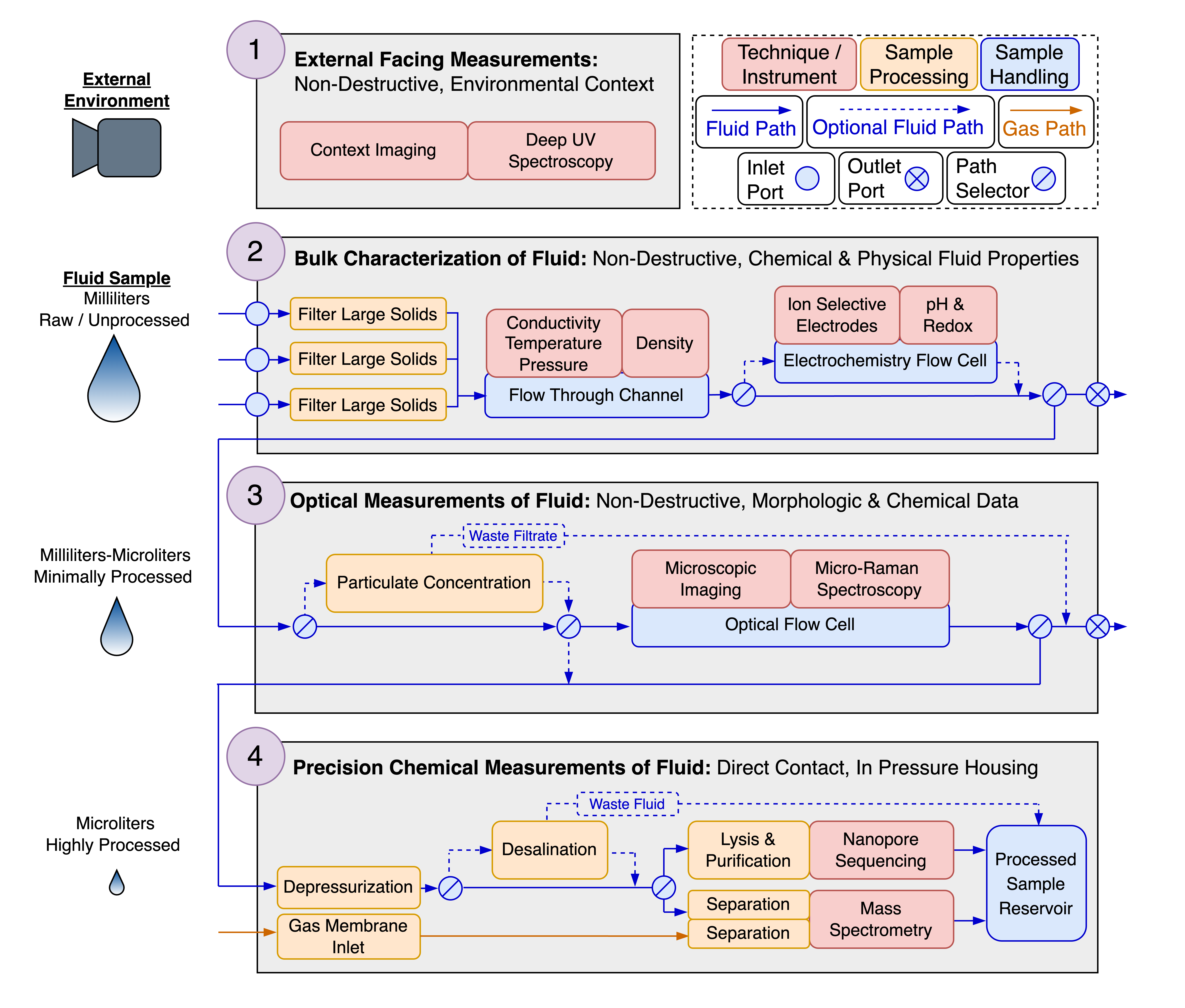 Subsurface Science and Search for Life in Ocean Worlds Fig 1. Conceptual diagram of the SSSLOW payload. (A life detection package concept for future sub-surface missions to “Ocean Worlds” such as Europa and Enceladus.) | 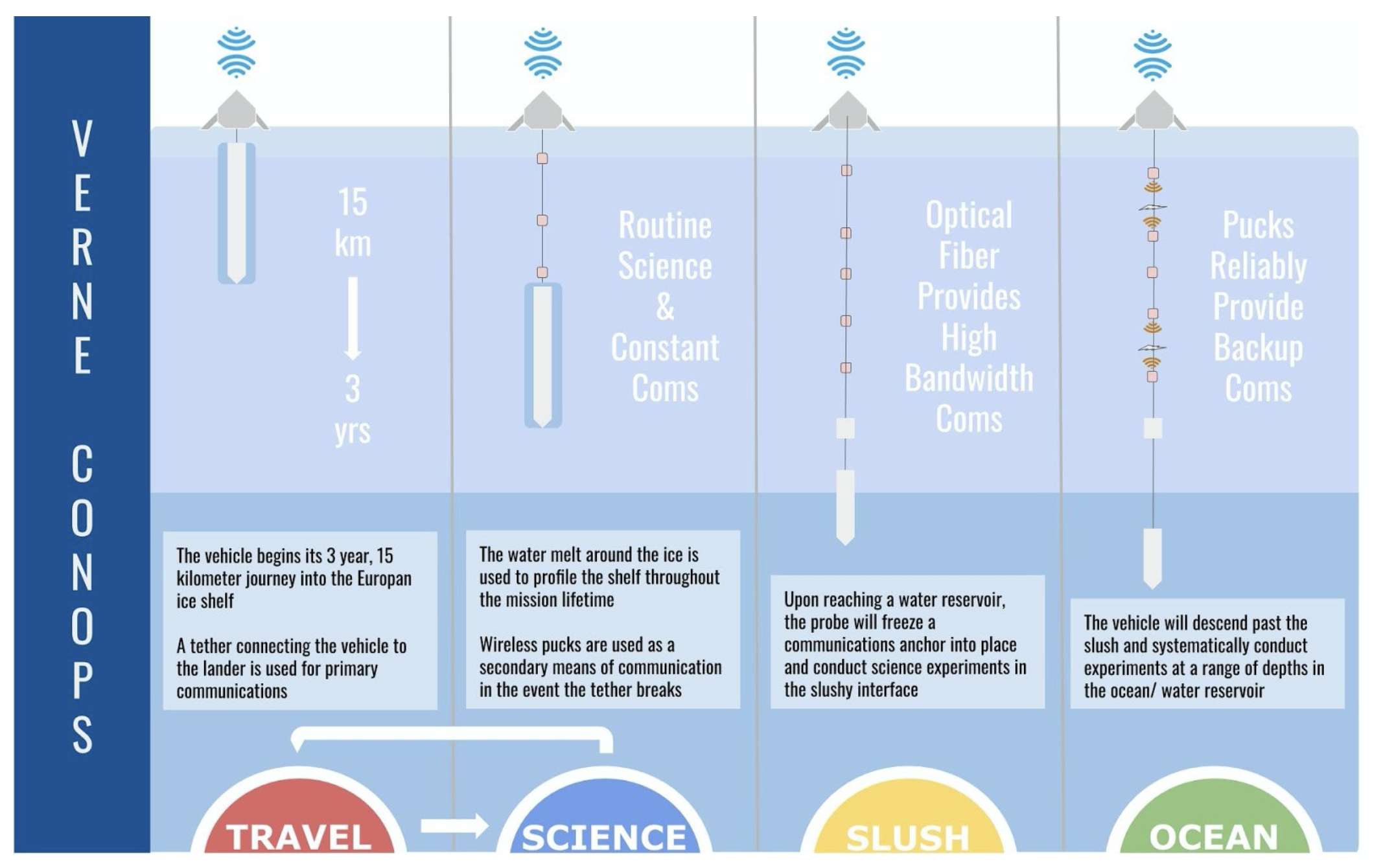 Vertical Entry Robot for Navigating Europa (VERNE) Mission and System Design Fig 2. VERNE concept of operations for drilling through Europa’s the ice shell. |
Description: Europa is a moon of Jupiter with a thick ice shell overlying a large liquid ocean. VERNE is a NASA funded concept study for a mission to melt through the ice shell of Europa in order to search for life in its interior.
Contributions: Co-led a team of 21 scientists and engineers developing a conceptual life detection science payload for the VERNE melt probe. Team surveyed state-of-the-art technologies for life detection (microscopic imaging, raman spectroscopy, mass spectrometry, nanopore genomic sequencing, ion-selective electrodes) and sample handling. Evaluated techniques from ocean, earth, and space science.
Outcomes: The team developed ‘Subsurface Science and Search for Life in Ocean Worlds’ (SSSLOW) a concept payload, with a novel architecture that performs sequential measurements on liquid samples with increasing detail. Defined critical science objectives, leveraged existing technological capabilities, and identified areas for needing further development. The team also developed a melt probe probe design and sub-surface mission architecture.
Co-Authored Publications: Lawrence (co-lead), Mullen (co-lead), et al. Planetary Science Journal 2023, Bryson et al. AIAA ASCEND 2020, Bryson et al. Earth and Space Science 2023
Funding: Work funded by $2M NASA Scientific Exploration Subsurface Access Mechanism for Europa (SESAME) grant led by PI BE Schmidt.
Pingo Sub Terranean Aquifer Reconnaissance and Reconstruction (PINGO STARR)
 |  |  |
Description: Pingos are ice cored hills which exist on earth and potentially other planetary bodies. This project investigated Pingos with several geophiscal instrumentation (ground penetrating radar - GPR, capacitavely coupled resistivity - CCR, and transient electromagnetics - TEM). - Pingo STARR Homepage
- Contributions: Lead Field Engineer on two field season surveying Pingos in the Arctic. Adapted geophysical instrumentation for mobile operation in Arctic tundra, developed instrument sled systems, and outfitted snowmobiles with scientific equipment. Operated in remote Arctic tundra, in harsh weather (-30°C to -10°C), working outdoors for ~8-10 hours at a time, collaborating with a team of 5-9 members.
- 2021: Deadhorse, Alaskan Arctic – 3 Weeks, 4 Pingo Surveys
- 2023: Tuktoyaktuk, Canadian Arctic – 2 Weeks, 9 Pingo Surveys
Outcomes: Surveys demonstrated instrumentation capabilities for future planetary exploration. Results revealed pingo permafrost structure significantly more varied and complex than previously documented.
Presentations: LPI 2021, journal publications in prep
- Funding: Work funded by $2.4M NASA PSTAR (Planetary Science and Technology from Analog Research) grant led by PI BE Schmidt.
Graduate School
Benthic Underwater Microscope
 Imaging unit internal components. Imaging unit internal components. | 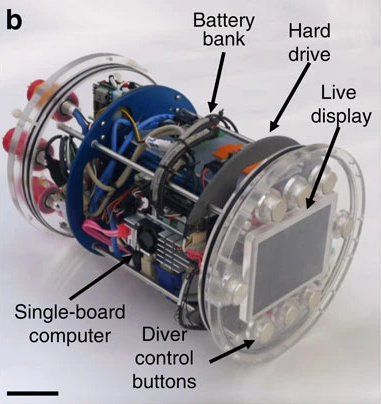 Control unit internal components. Control unit internal components. |  Underwater operation by a scientific diver. Underwater operation by a scientific diver. |
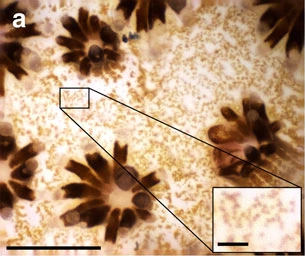 In situ coral image. In situ coral image. Main scale bar 500 μm, inset 50 μm. | 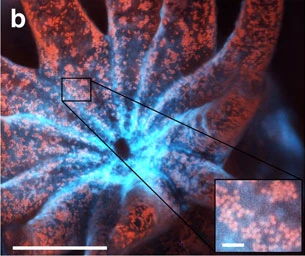 Fluorescent coral image taken in lab. Fluorescent coral image taken in lab. Main scale bar 500 μm, inset 50 μm. |  In situ coral competition timeseries. In situ coral competition timeseries. |
Description: Diver operated microscope capable of obeserving sea floor organisms such as corals in situ. Microscopic imaging is performed using a focus tunable lens, long working distance objective, and focused illumination. The system inculdes embedded computing and power in a custom housing
Contributions: Co-led the system development with Dr. Tali Treibitz. Jointly developed and tested optics, led development of imaging unit electronics, and led SCUBA deployments of instrument.
Outcomes: First system to image seafloor subjects such as corals underwater at micron-scale. Applied system to study coral behavior and bleaching in natural environments.
Publications: Mullen (co-lead), Treibitz (co-lead), et al. Nature Communications 2016, Mullen et al. OSA Novel Techniques in Microscopy 2017
Media: New York Times, Washington Post, Physics Today (Cover), Scientific American, Microscopy Today 2017 Innovation Awards
Submersible Micro-Particle Tracking Velocimetry (PTV)
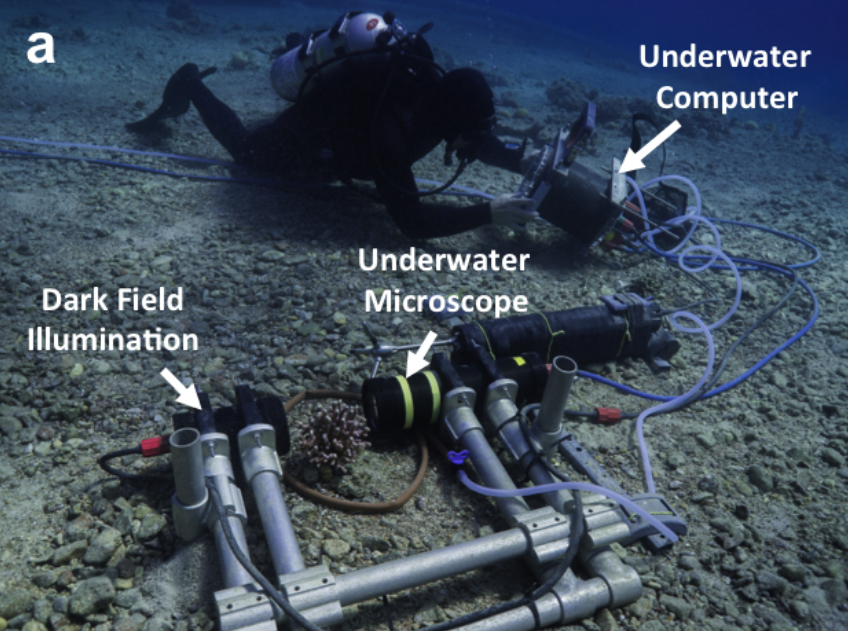 Underwater Micro-PTV system. Underwater Micro-PTV system. | 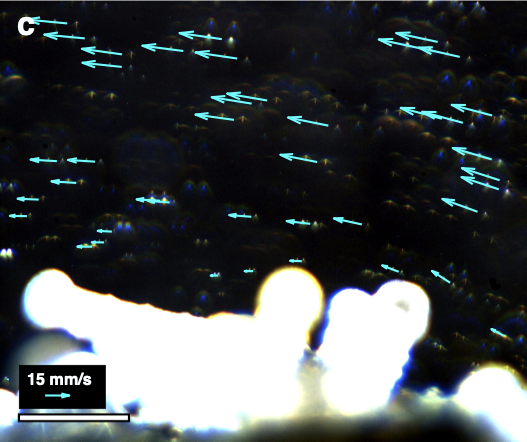 Particle tracking, 500 μm scale bar. Particle tracking, 500 μm scale bar. | 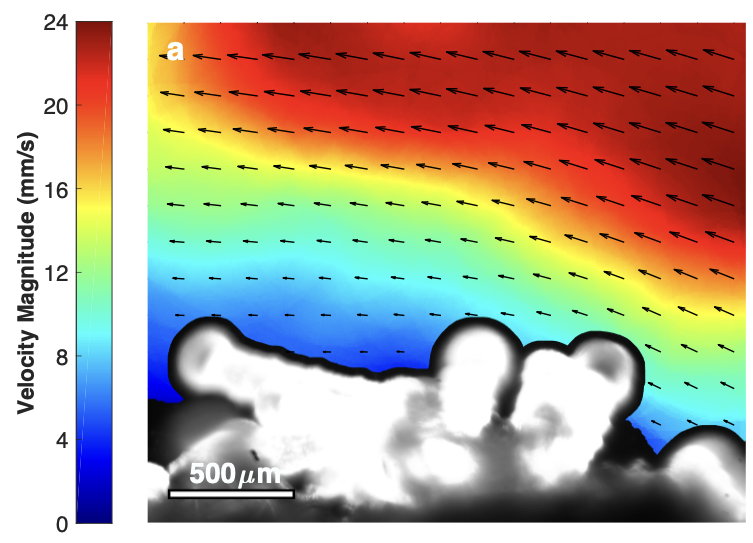 Time averaged velocity field, 500 μm scale bar. Time averaged velocity field, 500 μm scale bar. |
Decription: PTV is a technique used to measure two dimensional fluid dynamics based on images of particle motion. Here the Benthic Underwater Microscope was enhanced to perform PTV at micro-scales in the ocean around individual coral polys.
Contributions: Concieved and led project. Developed dark-field illumination to observe micro particles, implemented precision pulsed imaging, and developed particle tracking code. Deployed system in ocean and perform Fourier analysis of fluctuating two dimensional velocity fields.
Outcomes: Measured viscous fluid boundary layer surrounding coral polyps in the ocean for the first time, and observed interactions with surrounding ocean waters.
Publications: Ph.D. Thesis
Nassau Grouper Egg Tracking
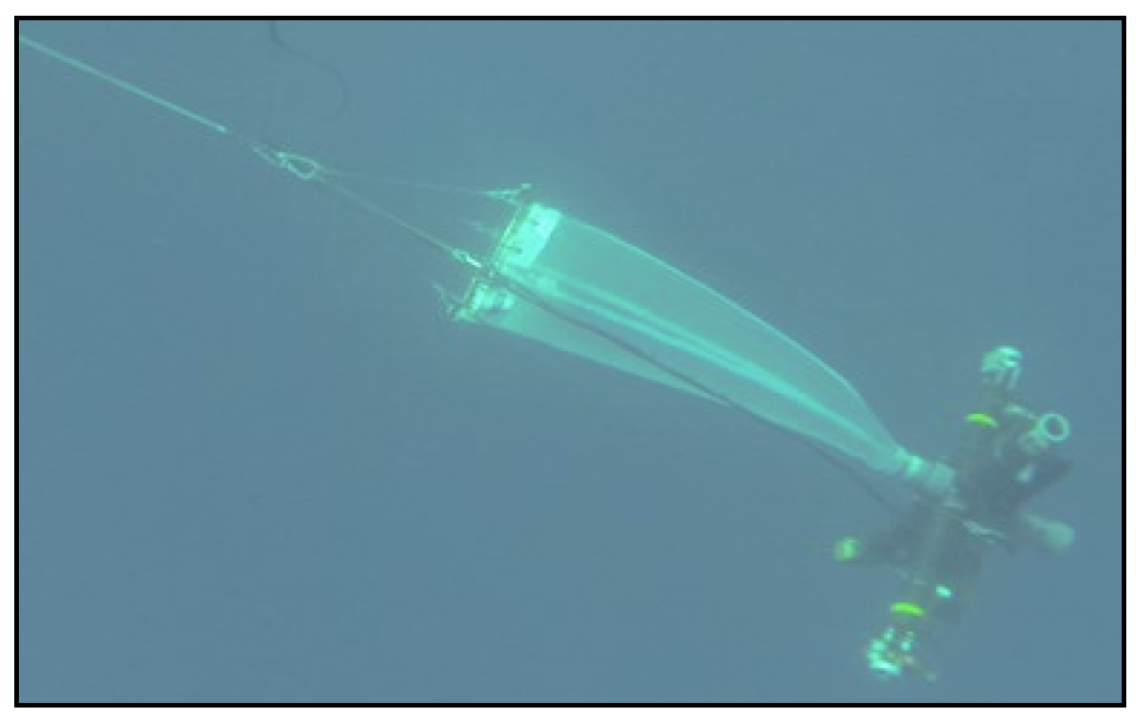 Towed underwater microscope system, year 1. Towed underwater microscope system, year 1. | 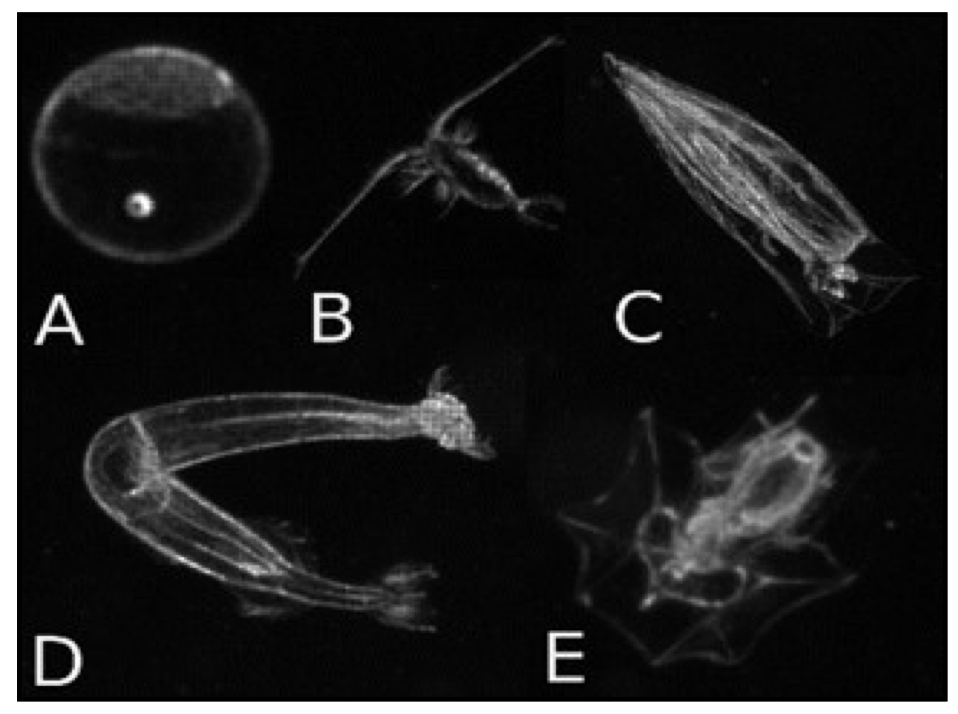 Towed microscope images, year 1. Towed microscope images, year 1. | 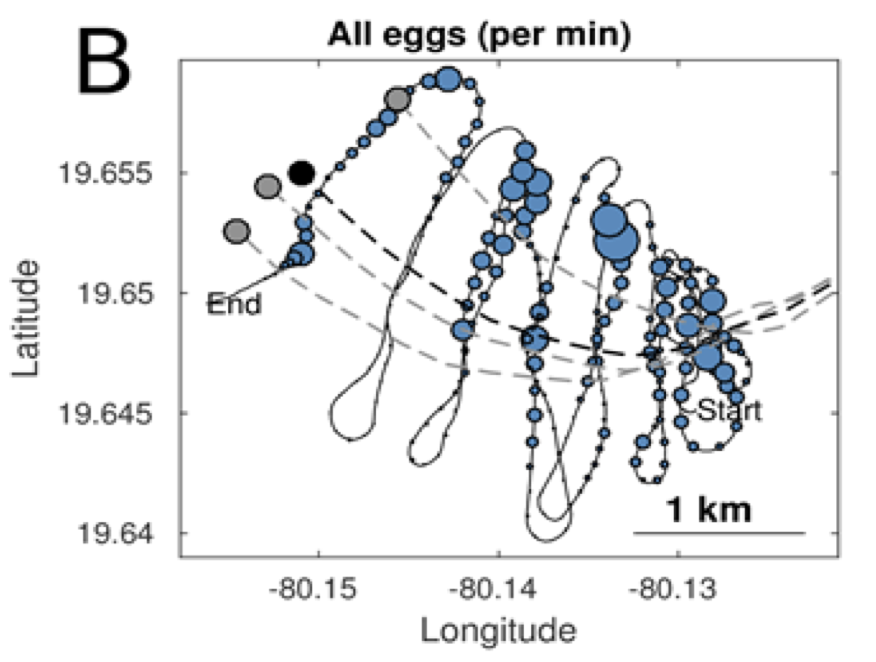 Egg tracking density map, year 1. Egg tracking density map, year 1. |
 Towed underwater microscope system, year 2. Towed underwater microscope system, year 2. |  Towed microscope images, year 2. Towed microscope images, year 2. | 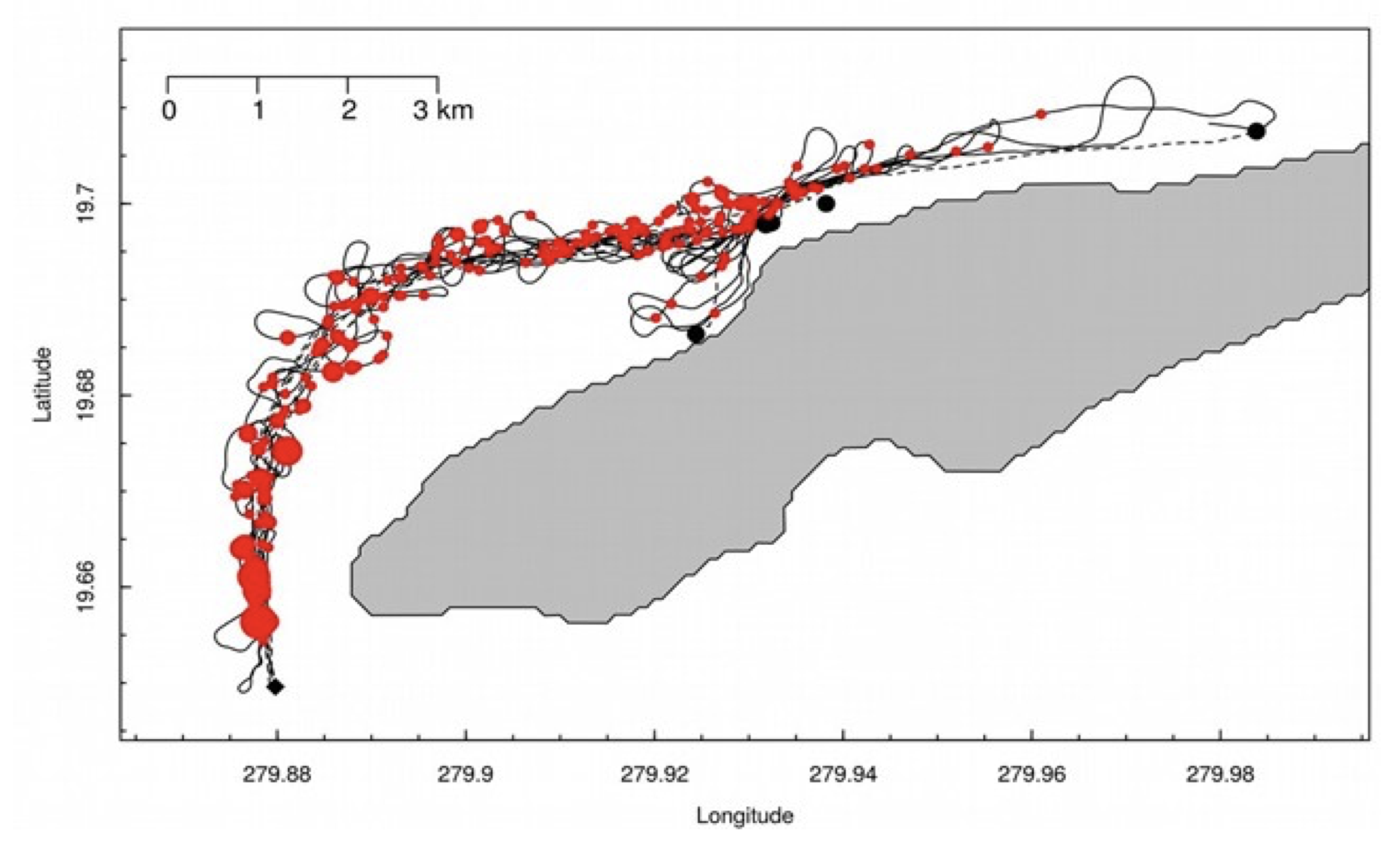 Egg tracking density map, year 2. Egg tracking density map, year 2. |
Decription: Processes occuring during egg life stage of fish is critical to population dynamics, however drifting eggs are very difficult to study in the natural environment. Here we developed a towed microscope system and used it to investigate Nassau Grouper egg dispersal following a mass spawning event.
Contribution: Engineering lead on integration and deployment of the towed microscopic imaging system. Worked with science team to deploy system in two sequential years to investigate the transport and dispersion of eggs following Grouper spawning.
Outcomes: Successfully tracked egg cloud and mapped egg densities in water column over multiple spawning nights.
Presentations: Stock, et al. Proceedings of the Royal Society B, 2023, Stock BC, Mullen A, et. al. 69th Annual Gulf and Caribbean Fisheries Institute, 2016, Stock BC, Mullen A, et. al. 70th Annual Gulf and Caribbean Fisheries Institute, 2017, journal publication accepted for publication in Proceedings of the Royal Society B: Biological Sciences
Undergraduate
Groundwater Hydrology, Benin, West Africa
 |  |  |
Description: International collaboration between the University of Notre Dame and University Abomey Calavi studying salt water intrusion into the coastal aquifers surrounding the capital city of Cotonou. (Advisor: Dr. Stephen Silliman)
Contributions: Conducted hydrology measurements at remote field sites to study costal saltwater intrusion over two summers. Lead small international team in field work, taught sampling methods, designed low-cost hydraulic field instruments, analyzed groundwater models.
Publications: SE Silliman et. al. Sustainibility 2010
NOAA Hollings Scholar, University of Alaska Fairbanks
Description: Summer internship at the University of Alaska Fairbanks studying oceanorgaphy of the Chukchi Sea, supported by the NOAA Hollings Scholarship. (Advisor: Dr. Tom Weingartner)
Contributions: Prepared and deployed ocean gliders and HF radars collecting data for pollution spill models in Arctic Ocean.